Бистабильный позвоночник позволил мягкому роботу перейти на галоп
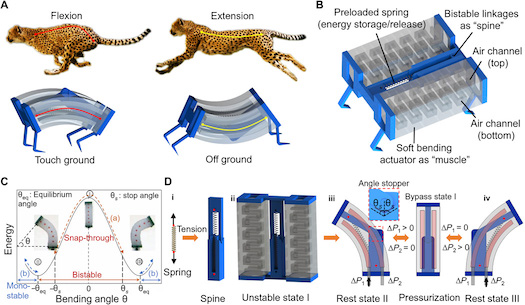
Американские инженеры предложили оснащать мягких роботов бистабильным позвоночником с пружиной — благодаря этому роботы могут передвигаться гораздо быстрее. Для демонстрации эффективности такого подхода авторы создали несколько прототипов, один из которых может галопировать со скоростью 2,5 длины тела в секунду, что в два раза быстрее полностью мягкого аналога.
Источник: N+1
Дата публикации: 11.05.2020
Первоисточник: Science Advances